
8月3日,西北工業大學研究團隊的學生給原理驗證樣機裝上蒙皮。
日前,由西北工業大學牽頭研制的滑撲一體自主變形仿生柔體潛航器在西安成功首航。自主變形仿生柔體潛航器項目以蝠鲼為仿生原型,將具備高推進效率、高機動性、高穩定性、低環境擾動、低噪音,以及大負載空間、大負載能力、海底軟著陸等特點。這款滑撲一體仿生柔體潛航器屬于原理驗證樣機,翼展0.8米,由鋰電池做動力,最高時速1節,能夠逼真模擬蝠鲼的各種運動姿態。同時,研究團隊正在開展三型工程樣機的研制,將具備1000米下潛深度,可持續工作1個月的能力。新華社記者 邵瑞 攝

原理驗證樣機在西北工業大學的游泳池內進行轉彎(8月3日攝)。
日前,由西北工業大學牽頭研制的滑撲一體自主變形仿生柔體潛航器在西安成功首航。自主變形仿生柔體潛航器項目以蝠鲼為仿生原型,將具備高推進效率、高機動性、高穩定性、低環境擾動、低噪音,以及大負載空間、大負載能力、海底軟著陸等特點。這款滑撲一體仿生柔體潛航器屬于原理驗證樣機,翼展0.8米,由鋰電池做動力,最高時速1節,能夠逼真模擬蝠鲼的各種運動姿態。同時,研究團隊正在開展三型工程樣機的研制,將具備1000米下潛深度,可持續工作1個月的能力。新華社記者 邵瑞 攝

西北工業大學研究團隊與原理驗證樣機合影(8月3日攝)。
日前,由西北工業大學牽頭研制的滑撲一體自主變形仿生柔體潛航器在西安成功首航。自主變形仿生柔體潛航器項目以蝠鲼為仿生原型,將具備高推進效率、高機動性、高穩定性、低環境擾動、低噪音,以及大負載空間、大負載能力、海底軟著陸等特點。這款滑撲一體仿生柔體潛航器屬于原理驗證樣機,翼展0.8米,由鋰電池做動力,最高時速1節,能夠逼真模擬蝠鲼的各種運動姿態。同時,研究團隊正在開展三型工程樣機的研制,將具備1000米下潛深度,可持續工作1個月的能力。新華社記者 邵瑞 攝

8月3日,西北工業大學研究團隊的師生對原理驗證樣機進行調試。
日前,由西北工業大學牽頭研制的滑撲一體自主變形仿生柔體潛航器在西安成功首航。自主變形仿生柔體潛航器項目以蝠鲼為仿生原型,將具備高推進效率、高機動性、高穩定性、低環境擾動、低噪音,以及大負載空間、大負載能力、海底軟著陸等特點。這款滑撲一體仿生柔體潛航器屬于原理驗證樣機,翼展0.8米,由鋰電池做動力,最高時速1節,能夠逼真模擬蝠鲼的各種運動姿態。同時,研究團隊正在開展三型工程樣機的研制,將具備1000米下潛深度,可持續工作1個月的能力。新華社記者 邵瑞 攝
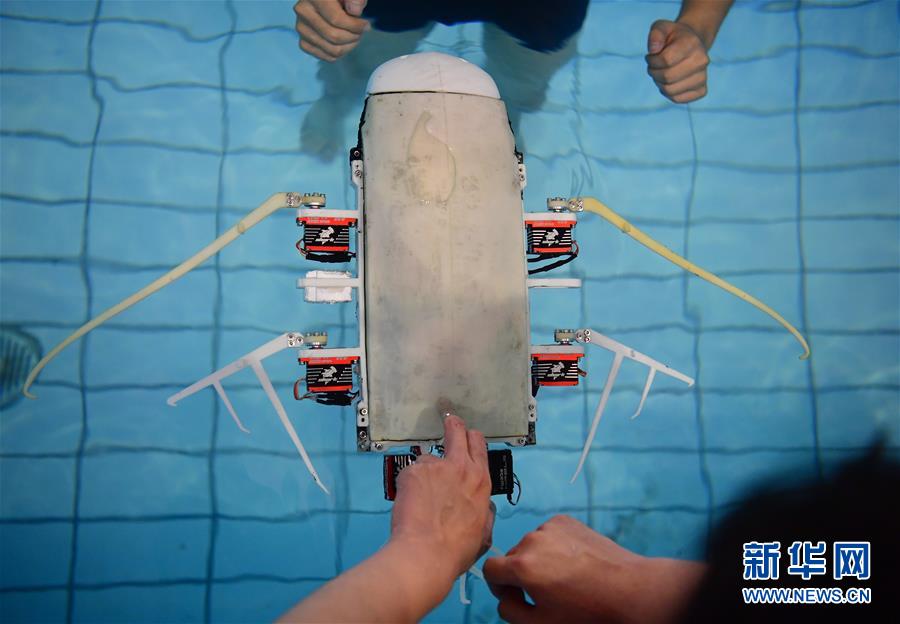
8月3日,西北工業大學研究團隊的學生在調試原理驗證樣機的內部骨架。
日前,由西北工業大學牽頭研制的滑撲一體自主變形仿生柔體潛航器在西安成功首航。自主變形仿生柔體潛航器項目以蝠鲼為仿生原型,將具備高推進效率、高機動性、高穩定性、低環境擾動、低噪音,以及大負載空間、大負載能力、海底軟著陸等特點。這款滑撲一體仿生柔體潛航器屬于原理驗證樣機,翼展0.8米,由鋰電池做動力,最高時速1節,能夠逼真模擬蝠鲼的各種運動姿態。同時,研究團隊正在開展三型工程樣機的研制,將具備1000米下潛深度,可持續工作1個月的能力。新華社記者 邵瑞 攝

原理驗證樣機在西北工業大學的游泳池內展示撲動前進(8月3日攝)。
日前,由西北工業大學牽頭研制的滑撲一體自主變形仿生柔體潛航器在西安成功首航。自主變形仿生柔體潛航器項目以蝠鲼為仿生原型,將具備高推進效率、高機動性、高穩定性、低環境擾動、低噪音,以及大負載空間、大負載能力、海底軟著陸等特點。這款滑撲一體仿生柔體潛航器屬于原理驗證樣機,翼展0.8米,由鋰電池做動力,最高時速1節,能夠逼真模擬蝠鲼的各種運動姿態。同時,研究團隊正在開展三型工程樣機的研制,將具備1000米下潛深度,可持續工作1個月的能力。新華社記者 邵瑞 攝

這是西北工業大學研究團隊研制的I型工程樣機(8月3日攝)。I型工程樣機翼展2米,重120公斤,采用剛性機翼,主要驗證滑翔能力。
日前,由西北工業大學牽頭研制的滑撲一體自主變形仿生柔體潛航器在西安成功首航。自主變形仿生柔體潛航器項目以蝠鲼為仿生原型,將具備高推進效率、高機動性、高穩定性、低環境擾動、低噪音,以及大負載空間、大負載能力、海底軟著陸等特點。這款滑撲一體仿生柔體潛航器屬于原理驗證樣機,翼展0.8米,由鋰電池做動力,最高時速1節,能夠逼真模擬蝠鲼的各種運動姿態。同時,研究團隊正在開展三型工程樣機的研制,將具備1000米下潛深度,可持續工作1個月的能力。新華社記者 邵瑞 攝 | 



268579cc-5be3-455e-82f0-41604b1738e8_batchwm.png)
f628f0c4-4bb7-4a34-9284-ab695f7b7b77_batchwm.png)
40a0eb02-4c11-4486-b8ac-954a31026cfc_watermark.png)
0a690b6a-4116-4d02-ab2b-7efffbd9fea3_watermark.png)
851d156b-1398-4b5f-8d5e-99a133c6c462.png)
598081e7-1a59-4e69-8e9c-ac309c26863e.png)
648b0c5a-c132-4e25-b286-155882c4eac1.jpg)
c7b02e93-68f8-4003-8862-174694908ee5.jpg)

0e68a9ee-5662-44d7-8313-806426b6e0b3.png)